



在人工智能和機器人技術不斷發展的今天,機器人的功能已經越來越豐富,但它們看起來仍然“很假”。除了深層的技術原因之外,這些機器人的皮膚就和人類又很大不同,它們沒有溫度,沒有觸覺,也就不能對外界作出反應。
最近,英國格拉斯哥大學的科學家們展示了一種創新的電子皮膚,具有觸摸和接近感應能力,而且無需使用專用的觸摸傳感器。
電子皮膚無需觸摸就能判斷物體接觸,還能自己“發電”
復制人類的觸覺是復雜的,電子皮膚需要靈活、有彈性、對溫度、壓力和紋理敏感,同時它們還需要能夠讀取生物數據并提供電子讀數。因此,如何實現電子皮膚的連續、實時使用是一個很大的挑戰。
為了解決這個問題,格拉斯哥大學的研究人員開發了一種由微型太陽能電池制成的能量發電電子皮膚,不需要專用的觸摸傳感器。這種太陽能電池不僅可以自己發電,還可以產生一些多余的能量,而且還可以觸摸和接近感應。他們的研究成果的早期論文已經發表在 IEEE 機器人學會期刊上。

當暴露在光源下時,電子皮膚上的太陽能電池就會產生能量。如果電子皮膚上的一個單元格被接近的物體遮擋,則光的強度以及因此產生的能量會降低,當單元格與物體接觸并確認觸摸時,其強度會降低至零。
在接近模式下,機器人的電子皮膚會通過光強度判斷物體與皮膚的距離。格拉斯哥大學 James Watt 工程學院 Bendable 電子和傳感技術小組的 Ravinder Dahiya 說:“機器人可以通過電子皮膚對比光的強度,并且在校準之后判斷與物體的距離。”現在,研究小組正在利用帶有太陽能電池的紅外發光二極管進行接近感應,以獲得更好的結果。
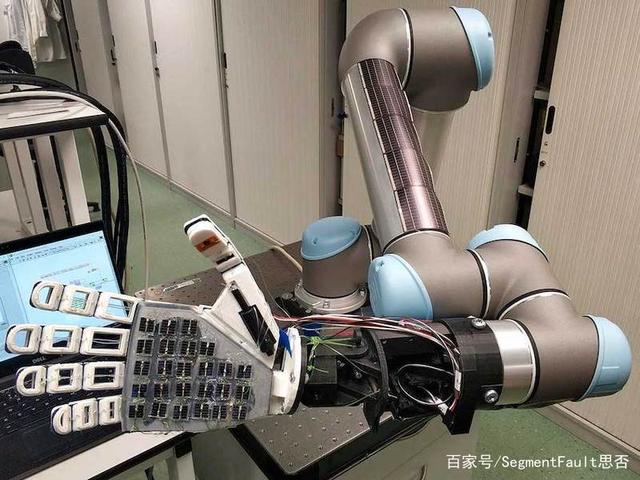
為了演示他們的概念,研究人員將一個普通的 3D 打印機器人手包裹在他們的太陽能皮膚中,然后記錄下它與周圍環境的互動。
概念驗證試驗表明,從機械臂的手掌中可以獲得 383.3 mW 的能量盈余。他們在論文中寫道: “如果整個身體區域都覆蓋了電子皮膚,則可以產生 100 W 以上的功率。”

Ravinder Dahiya 表示,對自動化的、電池供電的機器人來說,安裝一個消耗能量的電子皮膚是一個大問題,因為這會減少機器人可操作的時間。但如果電子皮膚本身就可以產生能量,那就可以延長機器人的運行時間。Ravinder Dahiya 說:“從本質上講,這項研究做到了把如何為機器人的大面積皮膚供電變成了一種可以產生能量的資源。”
電子皮膚的多種用途,汽車“穿上”可以提前感應障礙物
除了在機器人技術方面的明顯應用之外,Ravinder Dahiya 還設想了眾多應用可能。因為它具有材料集成的傳感能力,在醫療領域可以用在假肢上。Ravinder Dahiya 說:“們使用太陽能電池作為觸摸傳感器本身,不僅可以使它比其他電子皮膚體積更小,有利于制造重量和尺寸最佳的假肢,還能領先一步預測物體的接觸,這也可以有效得減少腦機接口中經常出現的時間延遲問題。”
在自動化部門也有應用的可能,特別是在電動和交互式車輛方面。一輛覆蓋著太陽能電子皮膚的汽車,因為它的接近感應能力,將能夠“看到”一個接近的障礙物或一個人。
Ravinder Dahiya 解釋說:“這不是生物學意義上的’看見’,而是從機器的角度。這可以集成到其他對象,而且不僅僅是汽車,包括體感游戲、手勢控制等各個領域都可以應用。”
目前,電子皮膚的測試還是在實驗室中單一的光源下進行的,照度為 650 勒克斯。但 Dahiya 認為如果他們能夠使用電子皮膚可以區分的多種光源,那么就有了更多有趣的可能性。他說:“我們正在探索不同的人工智能技術,以創新的方式處理數據,這樣我們就可以識別光源的方向和物體。”
研究團隊的成果使我們更接近靈活的、可持續使用的、成本效益高的電子皮膚,不僅可以觸摸,還能“看到”物體。
不過,這個項目目前仍存在一些挑戰,其中之一就是靈活性。Dahiya 表示,他們正在研究基于納米線的太陽能電池,希望在能量和傳感功能方面實現良好的性能。
希望未來這種電子皮膚可以應用在更多方面,為交互方式帶來更多可能。
技術編輯:芒果果 | 發自:思否編輯部